信号与系统
第二章习题
2.1

(a)
\[y_1[n] = 2 \delta[n + 1] + 4 \delta [n] + 2 \delta [n - 2] + 2 \delta [n - 1] - 2 \delta [n - 4]\](b)
\[\begin{aligned} y_3[n] & = y_1[n + 2] \\ & = 2 \delta[n + 3] + 4 \delta [n + 2] + 2 \delta [n] + 2 \delta [n + 1] - 2 \delta [n - 2] \end{aligned}\]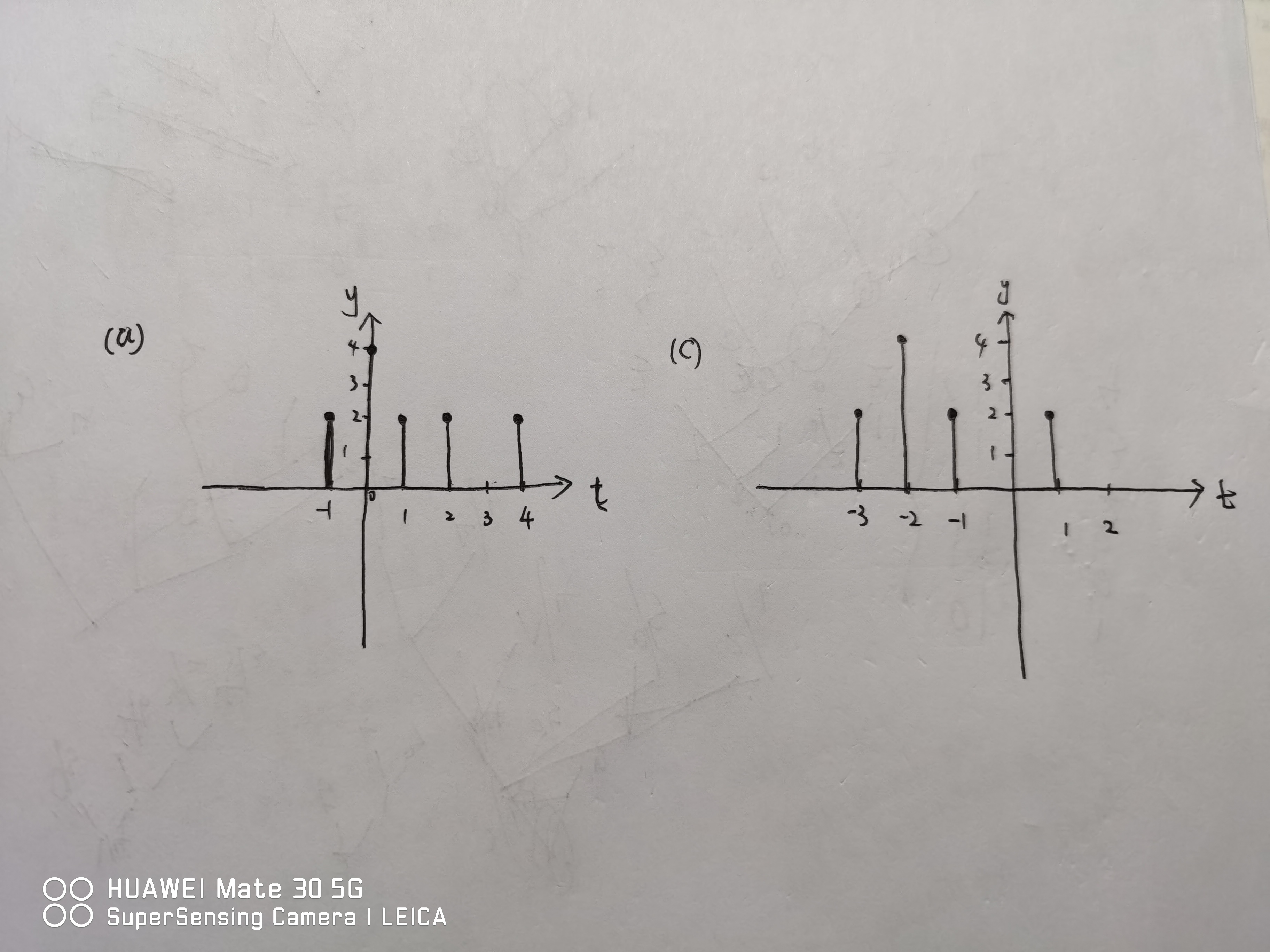
2.7
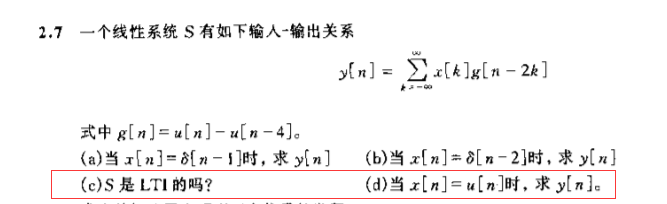
(c)
由(a),(b)可以得到
\[当 x[n] = \delta [n - 1] 时 \\ \begin{aligned} y_a[n] & = \sum_{k = - \infty}^{\infty} x[k] (u[n - 2k] - u[n - 2k - 4]) \\ & = \sum_{k = - \infty}^{\infty} \delta [k - 1] (u[n - 2k] - u[n - 4 - 2k]) \\ & = u[n - 2] + u[n - 4] \end{aligned} \\ 当 x[n] = \delta [n - 2] 时 \\ \begin{aligned} y_b[n] & = \sum_{k = - \infty}^{\infty} x[k] (u[n - 2k] - u[n - 4 - 2k]) \\ & = \sum_{k = - \infty}^{\infty} \delta [k - 2] (u[n - 2k] - u[n - 4 - 2k]) \\ & = u[n - 4] + u[n - 8] \end{aligned}\]因此,该系统是线性时变系统
(d)
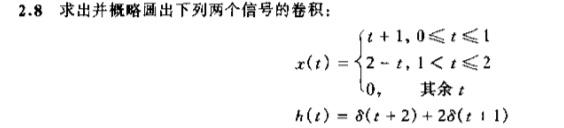
\[当 x[n] = ui[n] 时 \\ \begin{aligned} y[n] & = \sum_{k = - \infty}^{\infty} u[k] (u[n - 2k] + u[n - 4 - 2k]) \\ & = 2 \ u[n] - \delta [n] - \delta [n - 1] \end{aligned}\]2.8
2.9
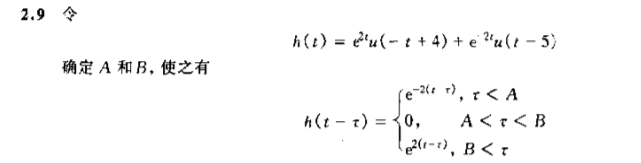
可以得到
\[\begin{aligned} \tau < A 时 \\ \begin{cases} u(-t + \tau +4) = 1 \\ u(t - \tau - 5) = 0 \end{cases} \rightarrow \begin{cases} \tau < t - 5 \\ \tau < t - 4 \end{cases} \rightarrow A = t - 5 \end{aligned} \\ \begin{aligned} A < \tau < B 时 \\ \begin{cases} u(-t + \tau +4) = 1 \\ u(t - \tau - 5) = 1 \end{cases} \rightarrow \begin{cases} \tau > t - 5 \\ \tau < t - 4 \end{cases} \rightarrow B = t - 4 \end{aligned} \\ 计算第三种情况,可以验证 B = t - 4\]2.14

(a)
\[\begin{aligned} \int_{\infty}^{\infty} h_1(t) {\rm d} t & = \int_{0}^{\infty}e^{-(1 - 2j) t} {\rm d} t \\ \end{aligned}\]上式有界,因此稳定
\[\begin{aligned} \int_{- \infty}^{\infty} h_1(t - \tau) {\rm d} t & = \int_{\tau}^{\infty} e^{-(1 - 2j) (t - \tau)} {\rm d} t \\ & = \int_{x}^{\infty} e^{-(1 - 2j) x} {\rm d} x, & x = t - \tau \end{aligned}\]上式得到其时不变性
易得其线性
因此该单位冲击响应对应于稳定线性时不变系统
(b)
\[\begin{aligned} \int_{- \infty}^{\infty} h_2(t) {\rm d}t & = \int_{0}^{\infty} e^{-t} \ {\rm cos} (2t) \ {\rm d} t \end{aligned}\]上式有界,稳定
\[\begin{aligned} \int_{- \infty}^{\infty} h_2(t - \tau) {\rm d}t & = \int_{\tau}^{\infty} e^{- (t - \tau)} \ {\rm cos} [2(t - \tau)] \ {\rm d} t \\ & = \int_{0}^{\infty} e^{- x} \ {\rm cos} [2x] \ {\rm d} x, & x = t - \tau \end{aligned}\]因此时不变,并且易得其线性,因此该单位冲击响应对应于稳定线性时不变系统
2.17
(a)
假设特解 $y_p(t) = Y \ e^{(-1 + 3j) t}$
可以得到 $(4 - 1 + 3j) Y \ e^{(-1 + 3j) t} = e^{(-1 + 3j) t}$
得到特解 $y_p(t) = \frac{1}{3 + 3j} \ e^{(-1 + 3j) t}$
假设通解 $y_h(t) = A \ e^{st}$
可以得到 $(As + 4A) \ e^{st} = 0$
并且因为系统初始松弛,$y(0) = A + \frac{1}{3 + 3j} = 0$
得到通解 $y_h(t) = - \frac{1}{3 + 3j} \ e^{-4t}$
所以得到结果为 $y_h(t) = \frac{1}{3 + 3j}[e^{(-1 + 3j)t} - e^{-4t}]u(t)$
(b)
同上,得到特解为 $y_p(t) = \frac{1}{6} e^{-t}({\rm cos}(3t) + {\rm sin} (3t))$
通解为 $y_h(t) = \frac{1}{6} e^{-4t}$
得到$y(t) = \frac{1}{6}[e^{-t}({\rm cos} \ 3t + {\rm sin} \ 3t) - e^{-4t}]u(t)$
2.18

由于 $y[1] = \frac{1}{4} y[0] + 1$
并且 $y[-1] = \frac{1}{4} y[-1]$
假设初始松弛,则可以得到 $y[n] = (1/4)^{n - 1} \ y[1] = (1/4)^{n - 1} \ u[n - 1]$
因此,结果为
\[y[n] = (1/4)^{n - 1} \ u[n - 1]\]